
Privacy policies
GDPR data Terms of use Cookies policy Privacy policy Delivery and Payment How to order?


Description
EXPERIMENTS
Features:
More products ED

OP-AMP CIRCUIT TRAINER ED-6000
• OP-Amp. characteristics and various appplication circuits |

TRANSPARENT HYDRAULIC TRAINER ED-7964
• Convenient parts fixation by �one-touch lever’ bases and aluminum profile structure |

ELECTRONICS DEMONSTRATION SYSTEM ED-2300
• 24 Experimental Boards in two sections : (A) Semiconductor and (B) Electronic Circuit |

BLOCK MODULAR PRODUCTION SYSTEM ED-9150
• Small size type suitable for traning on automation system’s installation and operation |

HYDRAULICS TRAINER ED-7960
• Convenient parts fixation by �one-touch lever’ bases and aluminum profile structure |

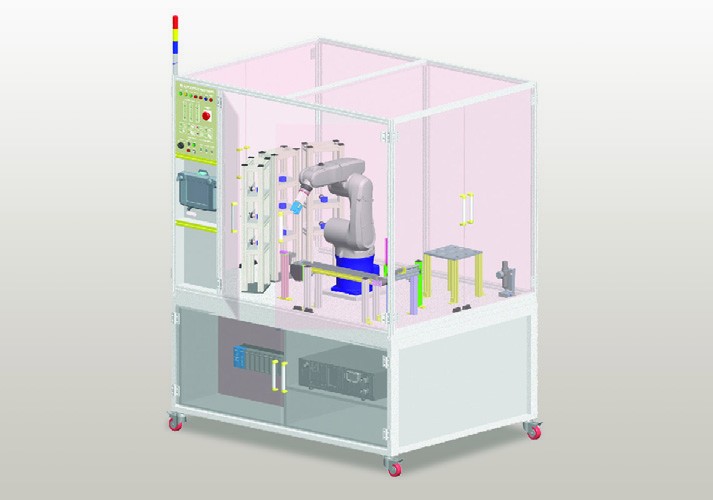
FACTORY AUTOMATION TRAINER ED-4031
• Comprehension of basic production automation processes such as transfer, fabrication, classification, inspection and storage |
4-AXIS SCARA ROBOT TRAINER ED-HS4
• Experiments on the industrial SCARA robot |

SENSOR APPLICATION TRAINER ED-6800B
• Inverting, Non-inverting and Differential Amplifiers |

IPTV TRAINER KIT EP-IPSTB
• Best solution for IPTV platform and IPTV Digital Broadcasting System in applications and experiments |

MINI MPS (MODULAR PRODUCTION SYSTEM) ED-9160
• Organization of various control elements in complexity for applied technology |


