
Privacy policies
GDPR data Terms of use Cookies policy Privacy policy Delivery and Payment How to order?


Description
EXPERIMENTS
Features:
More products ED

LED LAMP TRAINER ED-9810
• Practice basic method how to operate such as basic peration, Constant voltage, Constant current, serial connection, and arallel connection |

INTELLIGENT EDUCATION ROBOT PLATFORM ED-7270
• Ideal for the Ubiquitous and Home Network based experiments |
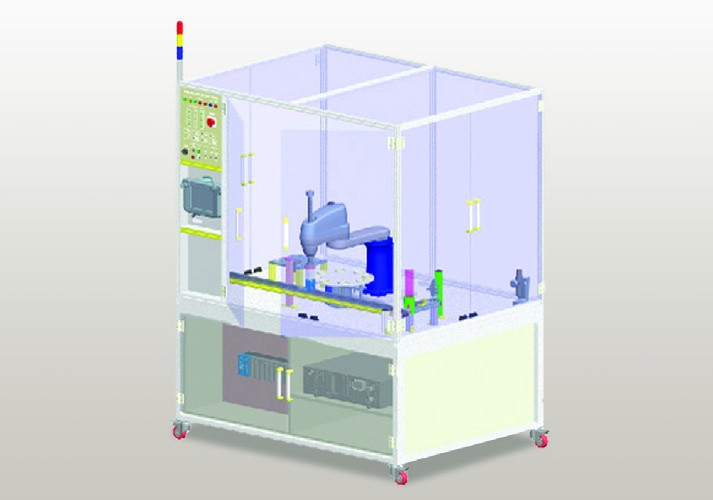
4-AXIS SCARA ROBOT TRAINER ED-HS4
• Experiments on the industrial SCARA robot |

HYDRAULICS TRAINER ED-7960
• Convenient parts fixation by �one-touch lever’ bases and aluminum profile structure |

ADSL TRAINING SYSTEM ED-NET-2
• Study of functions, characteristics, installation, repair and maintenance of basic ADSL components such as Telephone Exchange, Splitter, DSLAM, ADSL Modem, HUB and LAN Card |
FM TRANSCEIVER TRAINER ED-3600
• Realistic Simulation of FM stereo broadcast |

COMPUTER BASED INSTRUMENT SYSTEM CBIS-1400
• PC-based multi-function instrument for electricity/electronics and other experiments |

ELECTRONICS DEMONSTRATION SYSTEM ED-2300
• 24 Experimental Boards in two sections : (A) Semiconductor and (B) Electronic Circuit |

PNEUMATICS TRAINER ED-7860
• Convenient parts fixation by �one-touch lever’ bases and aluminum profile structure |

MULTI FUNCTION MEASURING INSTRUMENT SYSTEM ED-2110
• DC Amplifier |


