
Privacy policies
GDPR data Terms of use Cookies policy Privacy policy Delivery and Payment How to order?



Description
MOTOR SECTION
GENERAL CHARACTERISTICS
GENERATOR SECTION
ACCESSORIES
More products ED
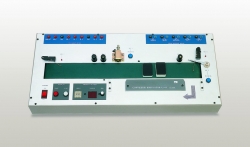
CONVEYOR CONTROL SIMULATION UNIT CU-4001
• Belt-type conveyor simulator |

ANALOG LAB UNIT ED-2200
• AF Generator and Frequency Counter(built-in) |
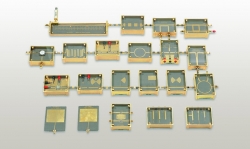
MICROSTRIP LINE TRAINER ED-3300
• Helps understand theories on the Microstrip Line Theory and Microwave Elements Design |

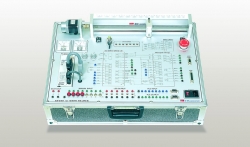
DAQ(DATA ACQUISITION) TRAINER ED-4110
• Remote mode by PC and Local mode by manual operation on the panel |

PULSE/DIGITAL COMMUNICATION TRAINER ED-2920
• Modularized by each communicarion type |
OP-AMP CIRCUIT TRAINER ED-6000
• OP-Amp. characteristics and various appplication circuits |
AC SERVO MOTOR TRAINER ED-4303
• Experiments on Servo Motor control techniques using Servo Driver |

SQUIRREL CAGE INDUCTION MOTOR/ DC GENERATOR MG-5212
• Start and load characteristics of squirrel cage induction motor |

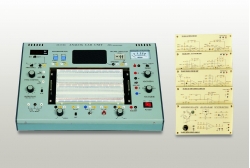
COMPUTER BASED INSTRUMENT SYSTEM CBIS-1400
• PC-based multi-function instrument for electricity/electronics and other experiments |

SENSOR APPLICATION TRAINER ED-6800B
• Inverting, Non-inverting and Differential Amplifiers |


