
Privacy policies
GDPR data Terms of use Cookies policy Privacy policy Delivery and Payment How to order?

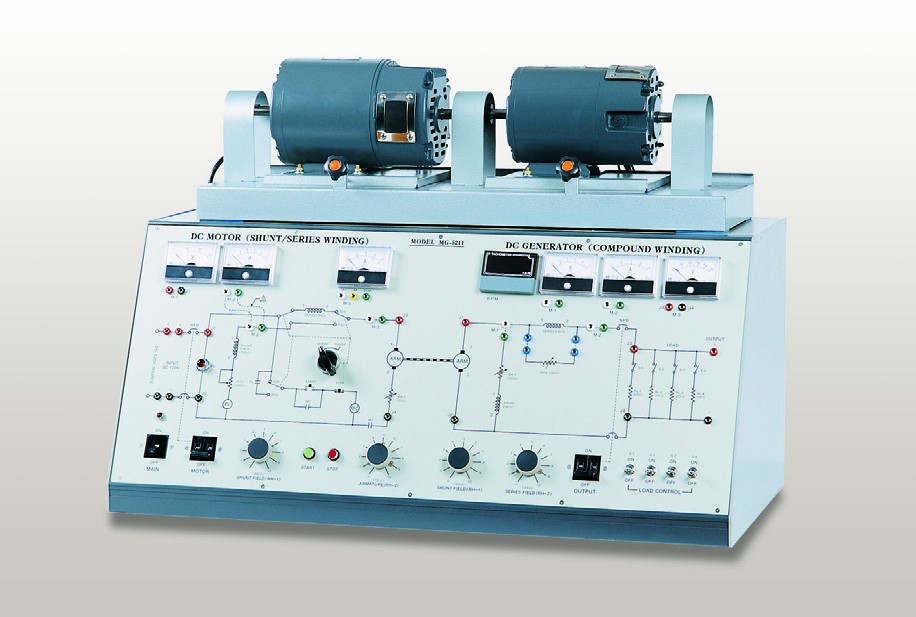

Description
MOTOR SECTION
GENERAL CHARACTERISTICS
ACCESSORIES
GENERATOR SECTION
More products ED

FUEL CELL TRAINER ED-9740
• Fuel cell generation using photovoltaic |

WOUND-ROTOR INDUCTION MOTOR/ DC GENERATOR MG-5213
• Load characteristics of shunt-wound and compound generators |

FUEL CELL TRAINER ED-9741
• Testing of load for maximum four fuel cell at the same time |

SERVO UNIT TRAINER ED-4270M
• Experiments on various types of special control unit |

LED LAMP TRAINER ED-9810
• Practice basic method how to operate such as basic peration, Constant voltage, Constant current, serial connection, and arallel connection |

HOME NETWORK DESIGN PLATFORM ED-5965
• Designed to help develop network devices on the basis of Lon Protocol |

PORTABLE MITSUBISHI PLC TRAINER ED-4260MP
• Industrial training enhancement in the field of PLC and sequence control |

PROGRAMMABLE LOGIC CONTROL TRAINER ED-4260
• Monitoring of internal data through the 4-digit LED |

LOGIC LAB UNIT ED-1000BS
• Hi/Lo Logic Switch |

SENSOR APPLICATION TRAINER ED-6800B
• Inverting, Non-inverting and Differential Amplifiers |


